| TOP‚ة–ك‚é |
| ‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg
|
|
 |
پœ‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg ƒCƒ“ƒ‰ƒCƒ“پAƒfƒXƒNƒgƒbƒv‚إ‚àژg‚¦‚é ƒRƒe•ûژ®پ@L-CAT-EVO |
- “‚¢‚ح‚ٌ‚¾•t‚¯ڈًŒڈ‚إ‚àٹب’P‚ةگف’è‚إ‚«‚éچ‚گ«”\‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg
- •ھ‰ً”\0.01‚چ‚چ‚جچ‚گ¸“xƒGƒ“ƒRپ[ƒ_•t‚ج‚T‘ٹƒXƒeƒbƒsƒ“ƒOƒ‚پ[ƒ^‚ًXYژ²‚ةچج—p‚µپA750mm/s‚جچ‚گ«”\‚ئŒJ•ش‚µگ¸“xپ}0.02‚چ‚چ‚ج—¼—§‚ًژہŒ»‚µ‚½چ‚گ«”\‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg
- ‚yژ²‚جگ^’†‚ةƒRپ[ƒh‚ً’ت‚µ‚½‚ج‚إ‚qژ²‚ھ‰ٌ“]‚µ‚ؤ‚àƒRپ[ƒh‚ة•‰’S‚ھ‚©‚©‚炸پAƒRپ[ƒh‚ج—چ‚ف“™‚جƒgƒ‰ƒuƒ‹‚ھ‚ب‚‚ب‚è‚ـ‚µ‚½پB
- 100ƒvƒچƒOƒ‰ƒ€پA‹L‰¯—e—ت100,000ƒ|ƒCƒ“ƒg‘خ‰‚إ‘½•iژيڈ¬ƒچƒbƒgگ¶ژY‚ةچإ“K
- ‚ح‚ٌ‚¾•t‚¯ڈًŒڈ198ژي—ق‚ج’†‚إŒآپX‚ةگف’è‰آ”\‚بچ‚گ«”\‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg
- پyƒAƒ|ƒچگ¸چHژذ ƒچƒ{ƒbƒg—p ƒRƒeگوپEƒ`ƒbƒvƒJپ[ƒgƒٹƒbƒW‚àژوˆµ‚ء‚ؤ‚¢‚ـ‚·‚ج‚إ‹CŒy‚ة‚¨–âچ‡‚¹‰؛‚³‚¢پz
|
 |
‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg L-CAT-EVOژd—l |
| “®چى•û–@ |
5‘ٹƒXƒeƒbƒsƒ“ƒOƒ‚پ[ƒ^ XYژ²ƒGƒ“ƒRپ[ƒ_•t |
| XYژ²چإ‘ه‘¬“x |
750mm/sec.
|
| Zژ²چإ‘ه‘¬“x |
150mm/sec. |
| Rژ²چإ‘ه‘¬“x |
360پ‹/sec. |
| أ¨°ءف¸ق•û–@ |
¼ق®¸ق·¨°‚ئگ”’l“ü—ح |
| جكغ¸ق×رگ” |
100 |
| ½أ¯جك‹L‰¯—e—ت |
چإ‘ه100,000ƒ|ƒCƒ“ƒg |
| گ¸“x |
پ}0.02mm |
‚ح‚ٌ‚¾•t‚¯ژd—l |
| ‚ح‚ٌ‚¾•tڈًŒڈ |
198ڈًŒڈ |
| ‚ح‚ٌ‚¾پi”¼“cپj•t‚¯½أ¯جك |
21½أ¯جكپi‘g‘ض‚¦ژ©—Rپj |
| ƒRƒeگوگف’艷“x |
0 پ` 500پژ |
| 0 پ` 500پژ |
S+/S- : 1 پ` 50.0(mm/secپj |
| ƒ^ƒCƒ}پ[ |
0.1 پ` 99.9(sec.) |
| ƒRƒeڈم‰؛ |
ON/OFF |
| ƒqپ[ƒ^—e—ت |
100W |
|
|
|
|
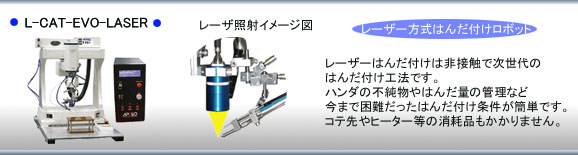
پœ‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg(ƒCƒ“ƒ‰ƒCƒ“پAƒfƒXƒNƒgƒbƒv) ƒŒپ[ƒUپ[•ûژ®پ@L-CAT-EVO-LASER |
- 4ژ²‚جƒچƒ{ƒbƒg‚ئ”¼“±‘جƒŒپ[ƒU30W‚ئ‘g‚فچ‡‚ي‚¹‚ؤپAژ…‚ح‚ٌ‚¾پi”¼“cپj‚ًژ©“®‹ں‹‹‚µ‚ب‚ھ‚ç‚جژ©“®‚ح‚ٌ‚¾پi”¼“cپj•t‚¯‚ھ‚إ‚«‚ـ‚·پB
- ژ…‚ح‚ٌ‚¾پi”¼“cپj‚ج‹ں‹‹ˆت’u’²گ®‹@چ\‚ً”ُ‚¦‚ؤ‚¢‚ـ‚·پBƒŒپ[ƒUڈo—ح‚حƒچƒ{ƒbƒg‚و‚è‰آ•د‚إ‚«‚ؤچ،‚ـ‚إ“‚©‚ء‚½ƒŒپ[ƒU‚ح‚ٌ‚¾پi”¼“cپj•t‚¯‚جڈًŒڈڈo‚µ‚ھ—eˆص‚ئ‚ب‚è‚ـ‚µ‚½پB
- ڈ]—ˆژ®‚جƒŒپ[ƒU”گU‘•’u‚و‚èپA’·ژُ–½پAڈ¬Œ^پAڈ¬ڈء”ï“d—حپAچ‚Œّ—¦پAٹ®‘S‹َ—â‚ئژg‚¢ˆص‚‚ب‚è‚ـ‚µ‚½پB
- Œُƒtƒ@ƒCƒoپ[‚إ“±Œُ‚·‚邽‚كپA‘•’u‚ة‘g‚فچ‚فˆص‚‚ب‚ء‚ؤ‚¢‚ـ‚·پB
|
 |
‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg L-CAT-EVO-LASERژd—l |
| “dŒ¹ |
AC100Vپ@50/60Hz |
| ƒGƒAپ[Œ¹ |
4.5Kg |
| ژg—p‚ح‚ٌ‚¾Œa |
ƒ³0.4mm–”‚حƒ³1.6mm |
| ‚±‚ؤ‰·“x |
0پ`490پژ |
| چإڈ¬پ@ڈWŒُŒa |
ƒ³0.4mm–”‚حƒ³0.6mmپ@ƒIƒvƒVƒ‡ƒ“ƒ³0.2mm |
| ڈإ“_پ@‹——£ |
–ٌ40mm |
| ƒtƒ@ƒBƒo‹ب—¦”¼Œa |
300‚چ‚چ |
| —â‹pپ@•ûژ® |
“dژq‹َ—â•ûژ® |
| گ§Œنپ@•ûژ® |
ژè“®گ§ŒنپA‚ـ‚½‚حٹO•”I/Oگ§Œن |
| ˆہ‘Sپ@‰ٌکH |
ƒCƒ“ƒ^پ[ƒچƒbƒN |
| •غژç•”•i/Œُƒtƒ@ƒCƒoپ[ |
“K‹X
|
| •غژç•”•i/ڈWŒُƒŒƒ“ƒY |
“K‹X
|
| •غژç•”•i/”¼“±‘جƒŒپ[ƒU |
20,000ژٹشˆبڈمپiٹْ‘زژُ–½پj |
|
|
|
|
پœچ‚‹P“xLEDژ©“®‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg |
- •ْ”M—p‚جƒVƒٹƒRƒ“‚ًƒfƒBƒXƒyƒ“ƒTپ[‚إ“h•z‚µ‚ؤƒeپ[ƒvƒtƒBƒ_پ[‚إژ©“®‹ں‹‹‚³‚ꂽLED‚ً‹z’…ƒpƒbƒh‚إ‹z’…‚µ‚ـ‚·پB‚ح‚ٌ‚¾•t‚¯ƒ|ƒCƒ“ƒg‚ـ‚إˆع“®‚µ‚½Œم‚ةLED‹z’…ƒpƒbƒh‚إ‰ں‚¦‚½‚ـ‚ـپA2‰سڈٹ‚ً“¯ژ‚ة‚ح‚ٌ‚¾•t‚¯‚ً‚µ‚ـ‚·پB
- —\”Mژ،‹ï‚جژg—p‚ئ2‰سڈٹ‚ج“¯ژ‚ح‚ٌ‚¾•t‚¯‚إƒ^ƒNƒgƒ^ƒCƒ€‚ج‘ه•’لŒ¸‚ئ•iژ؟Œüڈم‚ً“¯ژ‚ةژہŒ»‚µ‚½چإگVƒچƒ{ƒbƒg‚إ‚·پB
|
 |
چ‚‹P“xLEDژ©“®‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg L-CAT-EV4330DUALژd—l |
| “dŒ¹ |
AC100Vپ`AC240V |
| ژg—p‚ح‚ٌ‚¾پi”¼“cپjŒa |
ƒس0.3mmپ`ƒس1.6mm |
| ƒRƒeگو‰·“x |
0پ`499پژ |
| —\”Mژ،‹ï |
2پ~100‚vƒqپ[ƒ^پ[“à‘ں |
| ƒsƒbƒNƒAƒbƒvƒwƒbƒh |
‹z’…ƒpƒbƒh |
| ƒRƒeƒ†ƒjƒbƒg |
2ƒwƒbƒh‚إ‚Q‰سڈٹ‚ً“¯ژ‚ة‚ح‚ٌ‚¾•t‚¯ |
| ƒfƒBƒXƒyƒ“ƒTپ[ |
ƒVƒٹƒRƒ““h•z—p |
| ƒIƒyƒpƒlƒ‹ |
—¼ژè‹N“®ƒ{ƒ^ƒ“•t‚« |
| ƒRƒ“ƒgƒچپ[ƒ‹ƒ{ƒbƒNƒX |
ƒ}ƒjƒ…ƒAƒ‹ƒXƒCƒbƒ`‚Vژي—ق |
| ‚ح‚ٌ‚¾•t‚¯ژٹش |
–ٌ2.5•b/‚k‚d‚c |
|
|
|
|
پœ“ءژêژ©“®‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg |
- پyAET-3Sƒچƒ{ƒbƒgپz‚حƒeپ[ƒvٹî”آ‚ةڈ¬Œ^“dژq•”•i‚جژ©“®“‹چع‚ئ‚ح‚ٌ‚¾•t‚¯‚ً“¯ژ‚ةچى‹ئ‚إ‚«‚éƒچƒ{ƒbƒgƒVƒXƒeƒ€‚إ‚·پB
- پy‚ح‚ٌ‚¾Œںچ¸•tƒچƒ{ƒbƒgپzƒCƒ“ƒfƒbƒNƒXƒeپ[ƒuƒ‹‚ًژg‚¢2ƒXƒeپ[ƒVƒ‡ƒ“‚ج‚ح‚ٌ‚¾•t‚¯‚ًچs‚ء‚ؤپACCD‰و‘œڈˆ—‚إ‚ح‚ٌ‚¾•t‚¯Œ‹‰ت”»’è‚ئ“±’تŒںچ¸‚ً“¯ژ‚ةچs‚¤‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒgƒVƒXƒeƒ€
- پy“ءژê‚بƒچƒ{ƒbƒg‚ج‘ٹ’k‚à‰‚¶‚ـ‚·‚ج‚إ‚¨‹CŒy‚ة‚¨–âچ‡‚¹‰؛‚³‚¢پz
|
 |
“ءژêژ©“®‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg AET-3Sژd—l |
| •”•i‚ج‹ں‹‹ |
ƒNƒٹƒXƒ^ƒ‹پAƒZƒ“ƒTپ[پAƒXƒCƒbƒ`پAƒRƒlƒNƒ^پ[“™‚ًƒ{پ[ƒ‹ƒtƒBپ[ƒ_پ[‚إژ©“®‹ں‹‹ |
| ‰ءچHپEگ®Œ` |
ƒٹپ[ƒhگü‚ًƒtƒHپ[ƒ~ƒ“ƒO‰ءچH |
| ٹî”ص”ہ‘— |
ƒeپ[ƒvڈَٹî”ص‚ًƒٹپ[ƒ‹‚ة‚ؤژ©“®‹ں‹‹ |
| ‚ح‚ٌ‚¾•t‚¯ |
ٹî”ص‚ةƒ}ƒEƒ“ƒg‚µ‚ؤٹî”ص‚ًƒzپ[ƒ‹ƒh‚µ‚½‚ـ‚ـ‚Qƒ|ƒ“‚ئ‚ً“¯ژ‚ة‚ح‚ٌ‚¾•t‚¯ |
| ‚ح‚ٌ‚¾•t‚¯ژٹش |
3•b |
“ءژêژ©“®‚ح‚ٌ‚¾•t‚¯ƒچƒ{ƒbƒg ‚ح‚ٌ‚¾Œںچ¸•tƒچƒ{ƒbƒgژd—l |
| •”•i‚ج‹ں‹‹ |
ƒIƒyƒŒپ[ƒ^پ[‚ھژ،‹ï‚ةژو•t‚ؤ‚©‚ç—¼ژè‹N“®ƒ{ƒ^ƒ“‚إƒXƒ^پ[ƒg‚³‚¹‚éپB |
| ٹî”ص”ہ‘— |
ƒCƒ“ƒfƒbƒNƒeپ[ƒuƒ‹‚إٹeƒXƒeپ[ƒVƒ‡ƒ“‚ة”ہ‘— |
| ‚ح‚ٌ‚¾•t‚¯ |
LUNA2‘ن‚إƒ|ƒCƒ“ƒg3“_پAˆّ‚«‚ح‚ٌ‚¾4“_‚ً2ƒXƒeپ[ƒVƒ‡ƒ“‚إچs‚¤پB |
| ‰و‘œڈˆ— |
CCDƒJƒپƒ‰‚ة‚ؤ2‰سڈٹ7“_‚ج‚ح‚ٌ‚¾•t‚¯Œ‹‰ت‚ً”»’èپB |
| ‹@”\Œںچ¸ |
Œںچ¸ƒvƒچپ[ƒu‚ًژg‚¢پA“dŒ¹“ٹ“ü‚µ‚ؤ‹@”\Œںچ¸ |
| ‚ح‚ٌ‚¾•t‚¯ژٹش |
‚ح‚ٌ‚¾•t‚¯7“_‚إ15•b |
|
|
|
|
